Raspberry Pi 4b (4GB model)を購入
Raspberry Pi 4b (4GB model)を購入しました。
秋月のセットを購入。
いろんなところで売っているのでどこで買ってもよいんだけど、
電子部品を買う必要があり一緒に通販で購入しました。
当面の用途はローカルのDNSリゾルバにすること。
ルータがEDNS0に対応していないためGoogleのDNSを使っているのですが、
いくらレスポンスが早いと言っても、やっぱりローカルでDNSは持ちたい。
あと、ローカルに常時電源入ったデバイスがほしかったというのも理由。
買うときに少し悩んだのが発熱がどうなのかという点。
早速購入直後の状態で確かめてみたところ、以下の通りでした。
ちょっと高いかな…。
ちなみに、1コアだけCPUに負荷をかけると以下の通り。
室温が23度の条件で上記なので、夏場は厳しいかも…。
ちなみに、Power Management の状況を確認したところ、idle時は600MHz、
一方で高負荷時は1.5GHzで動作している。
気休めにヒートシンクはつけてみたものの、あまり変わらず…。
うん、何となくそんな気はしていた。
運用してみてあまりにも酷ければ、ファンをつけることも考えよう。

必要な設定項目を設定。
GUIは停止して、SSHは常時起動に変更。
最後にバージョンを確認。
kgdbを使ったカーネルのデバッグ
kgdbを使ったLinux Kernelのデバッグ方法をまとめてみました。
この説明は以下の内容を元にして、具体的な手順を説明したものです。
kgdb, kdb の使い方と、カーネルデバッガーの内部
https://sites.google.com/site/kandamotohiro/linux/kgdb
カーネルの設定の確認
まずはカーネルの設定を確認。以下の通りに設定をします。
ビルドして起動できることを確認します。
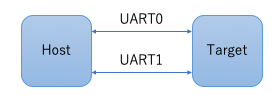
ホストとターゲットの構成
ホストとターゲットは2本のUARTで接続します。
1本はカーネルログの出力確認、breakコマンドの入力、シェルの操作を行うために使用します(以降の説明ではUART0)。
もう1本はkgdbの通信用に使用します(以降の説明ではUART1)。
UARTが1本しかないケースは、SSHで代替することもできます。
ただし、この場合、任意のタイミングでbreakをかけられないことと、カーネルログの出力が確認できないため、あまりおすすめはしないです。
ターゲットのカーネルを起動する
カーネルの引数にkgdbwait, kgdbocを追加します。
kgdbwaitは、カーネル起動時にkgdbの接続を待ちます。
kgdbocはUART経由でgdbに接続することを指定します。kgdbocには使用するttyとボーレートを設定します。
以下はUART1に対して、115.2kbpsのボーレートを設定しています。
1kgdbwait kgdboc=ttyS1,115200
またカーネルログの出力先は以下のとおりUART0に対して設定します。
1console=ttyS0,115200
カーネルを起動して、以下の表示が出るとkgdbの接続待ちの状態になります。
ホストからターゲットに接続する
ホストからターゲットのカーネルに対して、gdbでアタッチします。
ビルドしたvmlinuxをgdbで読み込みます。
ターゲットがロードしたカーネルがzImageの場合でも、シンボル情報が必要になるためvmlinuxをロードします。
1$ arm-linux-gnueabihf-gdb vmlinux
次にkgdbocでUART1に対してアタッチします。
以下はホストの/dev/ttyUSB2とターゲットのUART1が接続されている例です。
接続に成功すると以下のようにbreakpointで停止します。
kgdbの操作
ほとんどの操作はgdbと同様に行うことができます。
以下によく使う操作を記載します。
ブレークポイントを設定&実行を再開する
手順はgdbと同様です。
以下はuio_readにブレークを設定する例です。
1(gdb) b uio_read 2Breakpoint 1 at 0x803d910c: file drivers/uio/uio.c, line 812. 3(gdb) c 4Continuing. 5[New Thread 1172] 6[New Thread 1135] 7[New Thread 1143] 8[New Thread 1146] 9[New Thread 1152] 10[New Thread 1153] 11[New Thread 1167] 12[Switching to Thread 1172] 13 14Thread 42 hit Breakpoint 1, uio_read (filep=0x839f9240, buf=0x7ef96c20 "", count=4, ppos=0x83bdff80) at drivers/uio/uio.c:812 15812 { 16(gdb)
任意のタイミングでブレークをかける
任意のタイミングでブレークをかける(つまり実行を停止して、gdbで操作できる状態にする)には、ホストからUART0に対してSysRq + gを入力します。
ホストからUART0への接続にscreenを使っている場合には、Ctrl-a -> b -> gでSysRq + gの入力できます。
SysRq +g を受け付けるとUART0には以下のように表示されます。
1# sysrq: SysRq : DEBUG
gdbは以下のようにブレークがかかります。
Linux Kernelのmenuconfigで検索をする
カーネルのconfigを一部設定変更したいと思って、menuconfigを探してみるもなかなか見つからないことが多い。
.configをテキストでざっと見つつ、メニューの階層を推測して…といままでやってたんですが、
実はmenuconfig上で検索できることを知りました。これはすごく便利。
やり方は、menuconfigのUIで"/"を入力すると検索ができます。
例えば、MAGIC_SYSRQを探した結果は以下の通り。
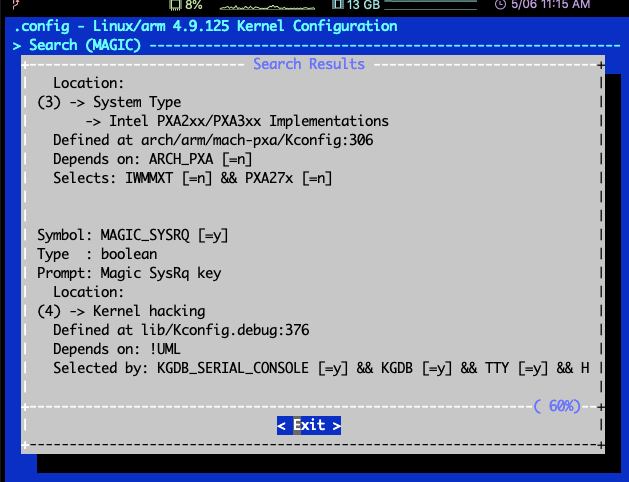
左側に(3)や(4)などの数字が出ているので、それに対応するキーを押すとジャンプできます。
またselected byやdependsが書かれているので、ここからどういう条件でそのメニューが有効になるか、確認ができます。